

We zouden jaren geleden al in zelfrijdende auto’s moeten rijden. Toch zijn ze er nog niet.
Hoewel de techniek al vergevorderd is, moet deze uitgebreid worden getest en hoe dichter bouwers bij de eindstreep komen hoe moeilijker dit wordt.
Ook is de huidige infrastructuur niet optimaal voor zelfrijdende auto’s.
Het wordt ons al jaren beloofd: een rit naar je werk in een volledig autonome taxi. Helaas is daar nog niets van gekomen. Autorijden is nog steeds handwerk. Het roept de vraag op: waarom is de volledig zelfrijdende auto er eigenlijk nog niet? En waarom duurt het eigenlijk zo lang?
Sinds 2015 worden we gebombardeerd met nieuwtjes over zelfrijdende auto’s. Ze zouden binnen enkele maanden ons straatbeeld veranderen. Die maanden werden jaren. En dat is logisch. De ontwikkeling van volledig zelfrijdende auto’s is moeilijker dan men dacht. Het ging in het begin met gigantische stappen. Binnen no-time hielden auto’s afstand van elkaar, hielden ze zichzelf binnen de wegbelijning en deden ze een noodingreep bij plotseling remmend verkeer. Daarna werd het stiller en stiller.
Een goed voorbeeld hiervan is Tesla’s Autopilot. Dat systeem doet alles wat hierboven staat beschreven, maar vrijwel niets meer. Toch belooft Elon Musk, CEO van Tesla, al jaren dat zijn voertuigen binnenkort volledig autonoom kunnen rijden. Maar het komt er nog steeds niet van. Nu, met de laatste update van de software (FSD 9), komt Tesla een klein stapje dichter bij volledige autonomie, maar is het nog steeds mijlenver verwijderd van het uiteindelijke doel. En dat terwijl de update ruim drie jaar op zich heeft laten wachten.
Nu heeft Tesla niet de volledige focus op autonoom rijden, dus kunnen we ook niet van het bedrijf verwachten dat ze als eerste de volledige autonomie-code kraken. Daarvoor kunnen we beter kijken naar bedrijven als Google’s Waymo en General Motors’ Cruise, de twee marktleiders op dit gebied.
Logischerwijs zijn deze dan ook een stuk verder dan Tesla met het laten rondrijden van auto’s zonder bestuurders. Sterker nog, ze zitten er niet ver vanaf. Bewijs: er lopen proeven met taxi’s die mensen van A naar B brengen zonder dat er iemand achter het stuur zit.

Afgeschermde en zorgvuldig gekozen testlocaties
Maar ook hier zijn kanttekeningen bij te plaatsen. De auto’s worden bestempeld als volledig autonoom, maar zijn nog lang niet klaar voor een ritje buiten hun afgeschermde gebied. Ze rijden op geselecteerde stukken asfalt en in relatief veilige omgevingen. In drukke stadscentra kom je ze niet tegen omdat de kunstmatige intelligentie in de auto menselijk gedrag niet kan voorspellen.
Ook bevinden de testlocaties zich in een zonnig klimaat waar het weinig regent en niet vriest. Autonome voertuigen hebben nog steeds erg veel moeite met vallend water en ijzige wegen. De sensoren kunnen daar simpelweg nog niet goed mee omgaan.
Kortom, de eerste 90 procent van de ontwikkeling van volledig autonome voertuigen ging van een leien dakje, maar nu de bouwers dichter en dichter bij de eindstreep komen, lopen ze tegen meer en meer onverwachte details aan. In veel gevallen zijn deze problemen op te lossen met veel data. Door machine learning in te zetten en deze te bombarderen met relevante informatie kan de kunstmatige intelligentie die de auto's bestuurt leren omgaan met kruisingen, splitsingen en andere moeilijke situaties.
Waymo doet dit bijvoorbeeld door hun voertuigen zoveel mogelijk zelf te laten rijden. Ze leggen miljoenen kilometers per jaar af en met elke kilometer leren ze een beetje meer.
Maar zelfs met die miljoenen kilometers zijn er bepaalde incidenten die de auto’s niet vaak tegenkomen. Ongelukken en troep op de weg zijn daar maar enkele voorbeelden van. Deze kun je ook niet makkelijk forceren. En zelfs als je dit soort situaties kan nabootsen, kost het een hoop tijd, geld en energie om hier een grote hoeveelheid data over te verzamelen.
Software laten leren met software: Simulation City
Waymo heeft een alternatief voor het testen in de echte wereld gevonden: Simulation City. Zoals de naam al verraadt is dit een gesimuleerde stad waarin robottaxi’s kilometers kunnen maken. Volgens Waymo heeft het op deze manier al miljarden kilometers aan data verzameld. Ook kan het bedrijf met de software taxi's testen op plaatsen waar het in de echte wereld nog te moeilijk of te gevaarlijk voor ze is.
Daarnaast maakt Simulation City het mogelijk om software-updates te valideren. Als alles in de virtuele wereld goed gaat, dan zijn er nog maar enkele ritten in de echte wereld nodig om dit te bevestigen. En dat laatste is een cruciale stap, want een valkuil van het leren en testen in een door een computer gegenereerde wereld is iets wat ze “garbage in, garbage out” noemen. Met andere woorden: als de computer de simulatie opbouwt met foutieve data, dan is de uitkomst van het leer- en/of testprocess compleet waardeloos.
Lees ook: Waarom files niet verdwijnen met zelfrijdende auto’s
Al deze factoren zorgen ervoor dat de laatste loodjes in dit geval zeker het zwaarst wegen. Progressie gaat langzaam, maar er wordt vooruitgang geboekt. En dat we er weinig van horen komt vooral doordat partijen als Waymo en Cruise liever geen onnodige risico’s nemen door een van hun voertuigen zomaar erop uit te sturen. Dit kan immers dodelijke gevolgen hebben, zoals we enkele jaren terug bij een incident met een autonoom voertuig van Uber zagen.
Een ongeluk met een zelfrijdende auto zorgt er niet alleen voor dat het publiek met nog meer terughoudendheid naar dergelijke voertuigen gaat kijken (het blijkt dat veel mensen niet zitten te wachten op een ritje in een auto zonder bestuurder). Ook helpt het niet mee om de benodigde verandering in wetgeving rond te krijgen. Dit is nodig, want wetgeving is nu gebaseerd op bestuurders van vlees en bloed. Als dat zo blijft vallen autonome voertuigen in een grijs gebied en kunnen er lastige juridische problemen ontstaan bij bijvoorbeeld een ongeluk. Tests met autonome auto’s gebeuren nu op basis van tijdelijke vergunningen of experimenteerwetten (in Nederland is zo’n wet in 2019 ingevoerd).

Verandering aan infrastructuur is nodig
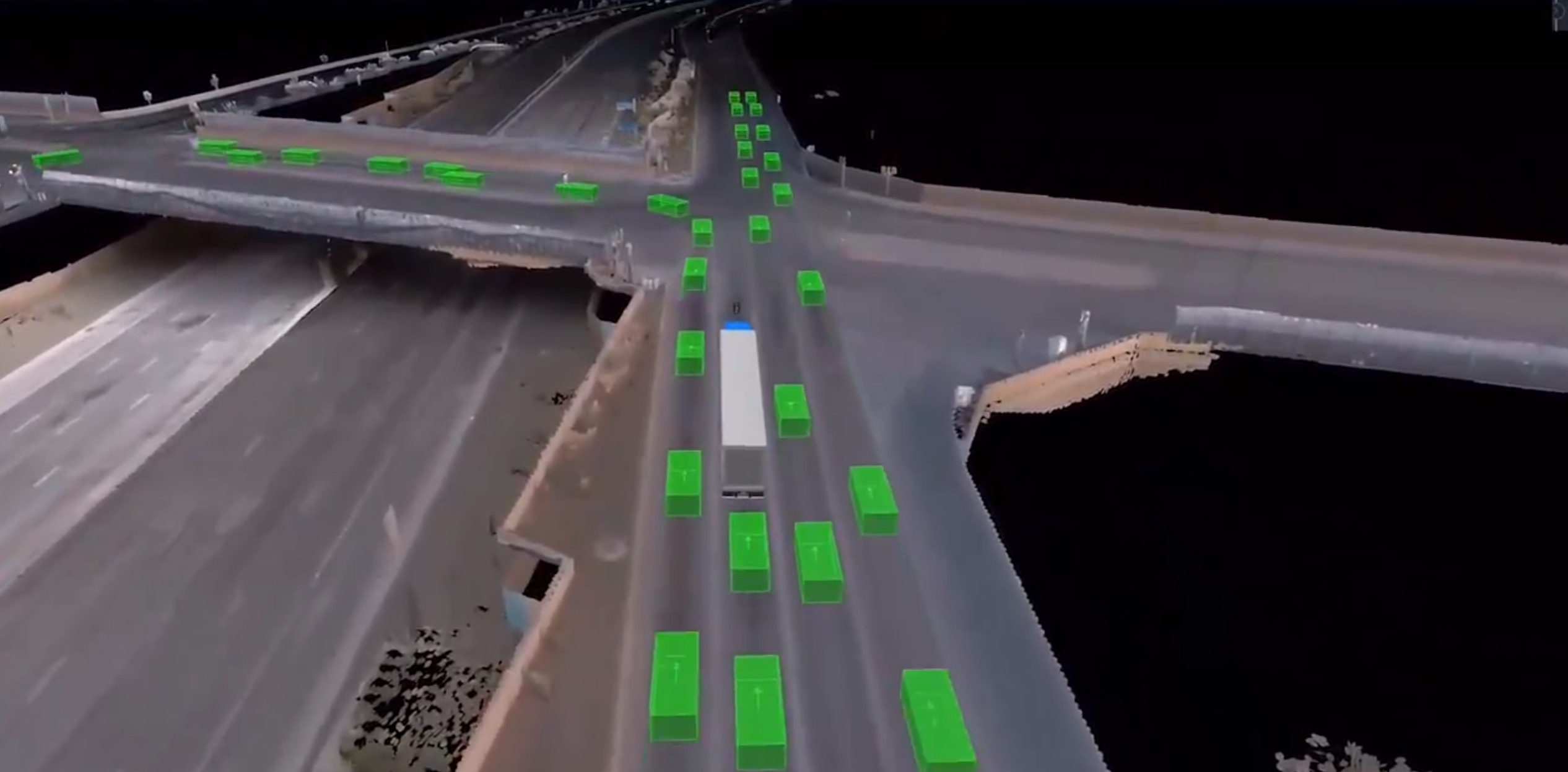
De infrastructuur waar we nu aan gewend zijn is niet per definitie geschikt voor zelfrijdende auto’s. Deze kijken op een andere manier naar de wereld en hebben moeite met het voorspellen van onvoorziene omstandigheden. Om de risico's die daaruit voortkomen te beperken zullen aanpassingen gemaakt moeten worden.
Onder deze aanpassingen zouden bijvoorbeeld sensoren langs de weg en op onoverzichtelijke locaties kunnen vallen. Alles om de bestaande wegen overzichtelijker te maken voor de robotvoertuigen.
Maar met deze kwestie kom je al snel uit bij een kip-en-eiverhaal, want in een perfecte wereld zouden die aanpassingen voor de introductie van een bestuurderloze auto al ingevoerd zijn. Dat is in de realiteit ondenkbaar. Het zou waarschijnlijk eerder andersom gaan: de autonome auto wordt eerst in het straatbeeld geaccepteerd waardoor veranderingen aan de infrastructuur makkelijker te verantwoorden zijn.
Lees ook: Waarom de zelfrijdende auto ook schadelijk kan zijn voor het milieu
Daarnaast krijgen we ook te maken met nieuwe privacygevoelige kwesties. Om menselijk gedrag beter in te schatten, zouden autonome auto’s graag de sensoren van de mobiele telefoon in je broekzak willen uitlezen. Denk bijvoorbeeld aan de GPS-locatie. Een zelfrijdende auto heeft daardoor een grotere kans om een ongeluk door een plotselinge oversteekactie te voorkomen. Dit omdat deze actie sneller gezien wordt door het brein van de auto. De complicaties die hierbij komen kijken zijn overduidelijk.
Al met al is het dus heel logisch dat we nog steeds niet met een autonome taxi naar werk kunnen. De technologie is simpelweg nog niet op het punt dat het een ritje van A naar B zonder ongelukken kan afleggen. Het is dus ook te begrijpen dat de bouwers van volledig autonome auto’s terughoudend zijn met de technologie die ze ontwikkelen.
Er zijn nog heel veel problemen die opgelost moeten worden voordat een volledig autonoom voertuig klaar is voor de echte wereld. En daar zullen gedurende de ontwikkeling van deze technologie nog veel nieuwe problemen bijkomen. Een volledig autonome auto zal pas komen als hij zijn werk echt veilig en goed kan doen. Wanneer dat is? Dat durven wij, en veel experts niet te zeggen. Er zijn zelfs experts die denken dat hij er helemaal niet komt.
